Smart Living Products
ISDN2001/2002: Second Year Design Project

Gripper Design & analysis
Quinton Yu's Independent Study
Types of gripper

Traditional gripper:
-
vacuum gripper (suction cups)
-
parallel pneumatic gripper
-
hydraulic gripper
-
servo-electric gripper
Traditional gripper:
-
granular jamming based soft gripper
-
gripper with soft fingers driven by positive pneumatic pressure
-
soft gripper with cable-driven fingers
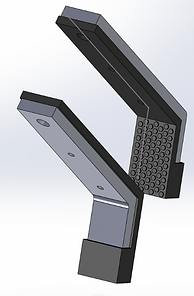
Frictional pattern
(Hexagon pattern)
The Adhesion & Contact Area Formula:
Stress Distribution and "Peeling" Resistance:
The hexagonal pattern acts as a network of independent, highly efficient friction micro-pads. It maximizes the real contact area (A), channels away lubricants via the boundaries, and ensures the gripping force (F) is completely independent of the direction the robot is moving.

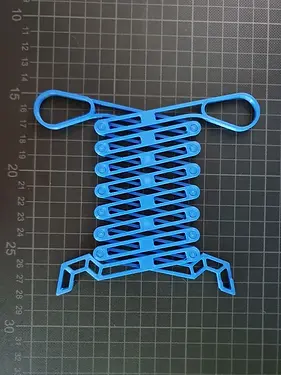
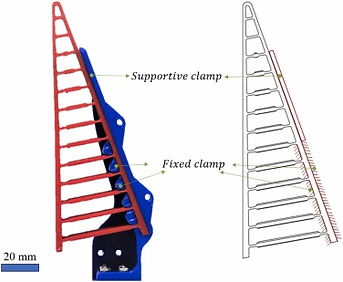
Finray gripper
A Finray gripper is a bio-inspired soft robotic end-effector (the "hand" at the end of a robot arm) that passively deforms to wrap perfectly around objects of almost any shape.
Instead of relying on complex sensors and multiple motors to calculate how to grip an irregular item, it uses clever geometry to adapt naturally on contact.

The Finray Effect Principle
A Finray finger achieves this behavior through a simple, elegant layout:
-
The Frame: It consists of two flexible outer bands meeting at a pointed tip to form an open triangle.
-
The Ribs: The inside of the triangle is filled with a series of interlocking cross-beams (ribs).
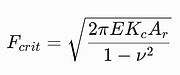
Large Deformation Modeling (Pseudo-Rigid-Body Model)
The structural stiffness of these virtual joints is calculated using:


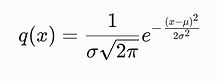
Contact Pressure Distribution (Gaussian Profile)
When a Fin Ray gripper successfully conforms to an object, it doesn't just touch it at one single point. The load spreads out into a continuous profile. Recent soft-robotic research models this distributed load (q(x)) along the length of the finger (x) as a Gaussian distribution:

Conclusion:
For finray gripper, we will use the materials with low stiffness for example: TPU or Silicone. These materials are able to cause the larger deformation to fulfil the larger l in Large Deformation Modeling formula.
And then, the contact surface area become larger due to the higher deformation to cause larger l and small standard deviation to achieve the higher pressure distribtion to grab thing more stable
Scissor claw
Translation to Rotation motion
When using the translation gripper like parallal gripper, a scissor structure can be install for the reason of going to narrow place to grab things.
Normal gripper

Scissor gripper
The scissor gripper can grab some big bowl more stable but the linkage is not stable due to the extended length of scissor causing to the higher torque of weight of the target