top of page
Smart Living Products
ISDN2001/2002: Second Year Design Project

Simulation
Dawoo Yoon's Independent Study
Simulation Goal

Simulation
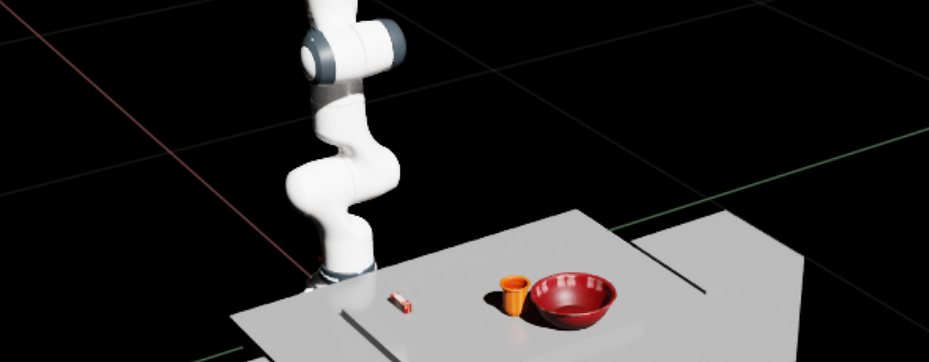
Setup

I built a robotic tray-sorting simulation in NVIDIA Isaac Sim to evaluate how workspace layout affects sorting efficiency. The environment included a Franka Research 3 robotic arm, a tray area, randomized tray objects such as bowls, cups, utensils, and paper trash, and three sorting bins for food waste, general waste, and reusable dishes.
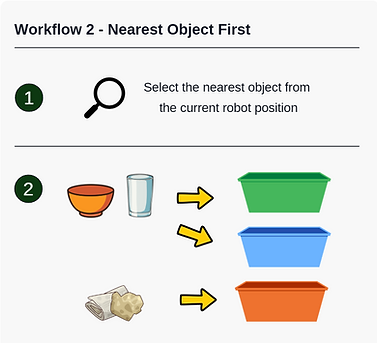
Workflow Strategies

Simulation Result
Performance comparison over 70 randomized simulation runs
Average Process Time (70 runs)


The nearest-object-first workflow achieved a lower average processing time of 42.902 s, improving efficiency by 3.184 s (6.9%) compared to the fixed workflow.
bottom of page