top of page
Smart Living Products
ISDN2001/2002: Second Year Design Project

Optimising Cutting Board Design for Projected Cooking Assistance
Megan's Independent Study


Design Rationale
Targeting the compact home kitchen for households of one to two people,
this study emphasizes efficient use of limited space while integrating the Ratatouille system into a domestic setting.
Beginning with ingredient preparation, the study explores the design of cutting boards that employ optimized zoning strategies and embedded fiducial markers. These elements assist in ingredient detection and enable precise laser projection, creating a streamlined and intelligent workflow for everyday cooking.
Kitchen Architectural Typologies and Dimensional Constraints
The small home kitchen size in Hong Kong has given constraints in designing the chopping board. Domestic layouts in Hong Kong are highly standardized, particularly in structures designed by the Hong Kong Housing Authority (HKHA). Two dominant configurations characterize the micro-kitchen typology:
The One-Wall (Linear) Typology

Mainly in private flats and nano-apartments (total floor area under 200 sq ft), the linear setup aligns the sink, the primary worktop, and the cooktop along a single structural wall.
The One-Wall (Linear) Typology
Mainly in private flats and nano-apartments (total floor area under 200 sq ft), the linear setup aligns the sink, the primary worktop, and the cooktop along a single structural wall.
The Galley Typology

In more traditional public rental housing and older private estates (e.g., Tai Koo Shing, Mei Foo Sun Chuen), the galley kitchen arranges components across two parallel counters.
In general, the preparation zone of a small home kitchen is around 300mm in width and 500mm in depth. Therefore, the chopping board size is constrained to the maximum of 250mm x 300mm. This dimension allows the board to sit flat on the worktop, ensuring safety during ingredient cutting while providing sufficient space for preparing meals of 1-2 people. Moreover, the bowls and other containers can be placed above the cutting board, streamlining the ingredient preparation flow. Considering the washability, this size can also fit perfectly into the small sink, which makes cleaning much easier.
Spatial Zoning Strategies of Chopping Board
_edi.png)
From the observation of ten home‑chef cooking processes, a consistent zoning pattern emerges in the use of chopping boards. The central area functions as the primary cutting zone, while the bottom sector is consistently obstructed by hand movements and therefore unsuitable for storage or cutting. The upper zone is used only occasionally, typically for holding small items—either cut or uncut. Beyond cutting, the chopping board also serves as a multifunctional worktop, supporting preparation activities such as container placement. This dual role is particularly evident in compact kitchens, where users maximize limited space by integrating cutting and preparation tasks on the same surface.

Top-Center
Occupancy: ~45%
High risk from food pile accumulation as chopped items are pushed upward.
Top-Right
Occupancy: ~10%
Scraps or waste placement.
Top-Left
Occupancy: ~10%
Occasional storage of uncut small items (garlic, ginger).
Center-Center
Occupancy: ~90%
The Strike Zone.
Continuous occlusion by the knife blade, both hands, and active food manipulation.
Center-Right
Occupancy: ~5%
Occasional knife resting or clearing strokes.
Center-Left
Occupancy: ~75%
The "Holding Hand" (claw grip) frequently resets here.
Bottom-Left
Occupancy: ~5%
Rarely occluded; occasionally crossed by the left wrist/forearm.
Bottom-Center
Occupancy: ~40%
Occluded by larger bulk ingredients before they are cut, or by the user's wrists.
Bottom-Right
Occupancy: ~50%
High risk of occlusion from the dominant forearm/wrist as it hovers over the board.
Considering the user behaviors of using chopping board, the fiducial markers and reference scales are better to be placed at the top and bottom area to minimize distraction and facilitate ingredient preparation process.
Visual Fiducial Systems Choice
In kitchen environments, occlusion poses a significant challenge, as the placement of ingredients and frequent hand movements can obstruct the camera’s view. Additionally, the under-cabinet positioning of the camera often results in dim lighting, further reducing detection accuracy. To mitigate these issues and maintain reliable system performance, selecting a robust fiducial marker for calibration is essential.
Types of Visual Fiducial Systems
High-density Matrix


e.g., QR, DataMatrix
High Latency:
may introduce visible coordinate lag during laser projection
Poor 6-DoF Pose
the internal patterns are not mathematically optimized for sub-pixel edge and corner extraction under acute perspective transformation
Square Matrix
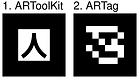
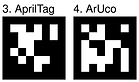
e.g., ARToolKit, ARTag, AprilTag, ArUco
Maximized Bit-Cell Area:
The low spatial frequency makes the marker highly resilient to resolution degradation and camera defocus.
Optimized for Speed:
Low computational footprint maximizes the frames-per-second delivery, reducing latency between the movement and projected laser line.
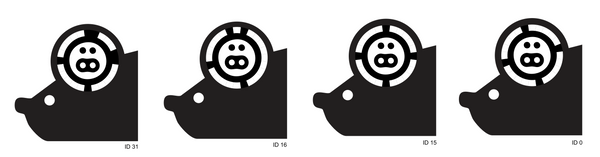
Concentric/Topological



e.g., WhyCode, CCTag, reacTIVision
Organic Graphic Blending
The circular shape can be embedded into the custom rat icon naturally to form a more aesthetic markers
The computer vision landscape features a wide array of visual fiducial systems, each engineered to optimize specific trade-offs between data payload density, computational efficiency, pose estimation accuracy, and aesthetic flexibility. After comparing their differences, ArUco Tag is selected as a benchmark for its robust edge extraction and mathematical error correction. However, it has a rigid, high-contrast square perimeter which is odd to fit in the surrounding. Hence, reacTIVision is chosen as an experiment for its aesthetic.
Prototyping and Testing
First Prototype: ReacTIVision
ReacTIVision yamaarashi markers are first experimented as it can blend into the rat shape and remains detectable.
The markers are first printed on a white paper to check its performance. However, not all the markers can be stably detected in different orientations and environment. Hence, only the robust ones are picked for designing the chopping board interface.

Although this design with reacTIVision markers can do calibration, it is still unstable and very sensitive to light and angles. Any small tilt of the board may lead to detection failure, which is not ideal for the intended application. Hence, there is a trade-off between aesthetics and functionality, which in this case the latter is more important for providing clear cooking guidance.

Second Prototype: ArUco Tag
Similar testing method as ReacTIVision, ArUcoTag DICT_4x4_50 markers are printed on a white paper
in different sizes (150mm and 200mm) for testing. The response is much quicker and accurate than the ReacTIVision markers, and both sizes have similar performance, providing a robust detection.

Then, these markers are engraved on the 5mm acrylic board and sprayed black in paint
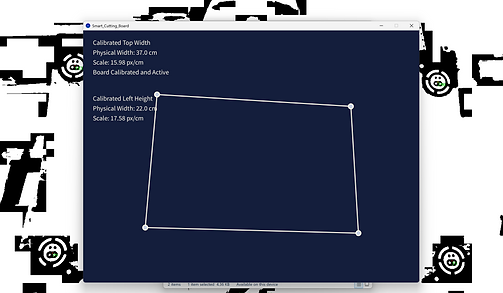
to observe its functionality in materials beyond white paper. However, it is observed that sizes under 200mmx200mm cannot be detected effectively on acrylic board, so the final design is settled on the marker size 200mmx200mm.

The final chopping board design uses the actual marker size (200mm x 200mm) as a reference for calibration. The figure below shows the distance between the center of the two markers at the top is calibrated to be 25.7cm with only 5mm error. Hence, it is effective enough for calibrating ingredient location and laser projection.

Summary: reacTIVision vs ArUco

References
Garrido-Jurado, S., Muñoz-Salinas, R., Madrid-Cuevas, F. J., & Marín-Jiménez, M. J. (2014). Automatic generation and detection of highly reliable fiducial markers under occlusion. Pattern Recognition, 47(6), 2280–2292. https://doi.org/10.1016/j.patcog.2014.01.005
Bencina, R., & Kaltenbrunner, M. (2005). The design and evolution of fiducials for the reacTIVision system. Music Technology Group, Audiovisual Institute, Universitat Pompeu Fabra.
Romero-Ramirez, F. J., Muñoz-Salinas, R., & Medina-Carnicer, R. (2018). Speeded-up ArUco an improved variant for generation and detection of marker-based fiducial systems. Pattern Recognition Letters, 114, 38–45.
Kaltenbrunner, M., & Bencina, R. (2005). reacTIVision: A computer vision framework for table-based tangible interaction. Proceedings of the international conference on New Interfaces for Musical Expression (NIME), 36–42.
bottom of page